Vision Transformers for implicit groundtruth tasks
Computer vision for combatting COVID-19 spread
Dark arts
Dark arts: exploration of the techniques and theory for processing and interpretation of low light images.
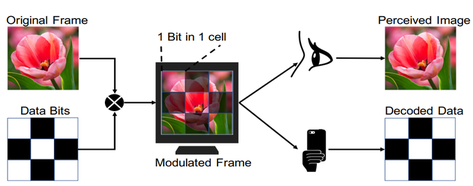
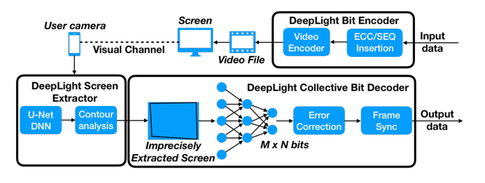
Deeplight : Screen to camera communication using computer vision
Trying to achieve robust and imperceptible visible light communication from computer screen to the camera by a pipeline consisting of modified deep learning based computer vision algorithms.
Non invasive infant sleep apnea detection
A portable device that can detect infant sleep apnea by video processing. Two video processing algotihms were developed.
Foreground estimation in dynamic background conditions
Dynamic background cancellation is a fundamental problem in video processing. Eventhough estimating the foreground is trivial in static background conditions, estimating the foreground can be tricky when the background is dynamic as well. In this project we try differrent approaches to detect the background and foreground in a video. We start with classical approaches and try to evaluate their pros and cons. Finally, we propose the most suitable combination of video processing operations to get the most accurate results.
Algorithms used
- PBAS Pixel based adaptive segmentation
- GMM Gaussian mixture model
- EM Expectatation maximization algorithm
- AGMM Adaptive gaussian mixture model
- FCMM Free Cylindrical mixture model
- AFCMM Adaptive free cylinder mixture model
- HVS Hierarchial video segmentation
- RPCA Robust Principle Component Analysis
- Morphological filtering
- SCC Strongly connected component analysis
Hyper Spectral Imagergy for remote sensing
- Contributing to a researh group developing a hybrid (supervised-unsupervised) algorithm for HSI remote sensing pixel based classification based on pixel spectrums for Pavia University dataset. (Algorithm implementation, testing, benchmarking, comparision)
- Working on developing gneralized algorithms for HSI remote sensing pixel classification for multiple datasets incorporating spectral and spatial data. (Algorithm development, implementation, testing, benchmarking, etc:)
Algorithms
- Spectral clustering
- CNN
- DNN
- Random forests
- LDA
Algorithm improvement for finite element based structural analysis technique
Attempting to improve the time and space efficiency of a new structural analysis algorithm based on finite element technique.
Brain Computer Interfacing : Visual cortex EEG Analysis
Mapping the EEG signals from Visual Cortex to what a person is seeing.
Performance improvement of signal level genome sequencing algorithms
Accelerating a part of Genome sequencing algorithm for high performance servers and low powered embedded devices.
Galvans - autonomous robots
Two robots (one stationary and one moving). Moving robot had capabilities to follow a line maze, identify coloured boxes and transmit the colour to the stationary bot that could shoot a ball to the colored target. The mobile bot could follow a wall as well.
Theseus - autonomous robot
A robot that can find it’s way through a wall maze, pick up a coloured payload and deliver it along a path marked by the particular coloured arrow.